This part is from the assignment 2018:
stanford cs231n assignment2
目标
- 之前已经实现了两层的fc net,但是在这个网络里面的loss和gradient的计算用的是数学方法
- 这样的计算可以在两层的网络里实现,但是多层的情况下实现起来太困难了
- 所以在这里把电脑分成了forward pass和backward pass
forward的过程中,接受所有的input,weights,和其他的参数,返回output和cache(存储back的时候需要的东西)
1
2
3
4
5
6
7
8
9
10def layer_forward(x, w):
""" Receive inputs x and weights w """
# Do some computations ...
z = # ... some intermediate value
# Do some more computations ...
out = # the output
cache = (x, w, z, out) # Values we need to compute gradients
return out, cacheback的时候会接受derivative和之前存储的cache,然后计算最后的gradient
1
2
3
4
5
6
7
8
9
10
11
12
13def layer_backward(dout, cache):
"""
Receive dout (derivative of loss with respect to outputs) and cache,
and compute derivative with respect to inputs.
"""
# Unpack cache values
x, w, z, out = cache
# Use values in cache to compute derivatives
dx = # Derivative of loss with respect to x
dw = # Derivative of loss with respect to w
return dx, dw这样就可以组合各个部分达到最终需要的效果了,无论多深都可以实现了
- 还需要一部分的优化部分,包括Dropout,Batch/Layer的Normalization
Affine layer:forward
input
- x:大小(N,d_1…d_k),minibatch of N,每张图片的维度是d_1到d_k,所以拉成一长条的维度是 d_1 d_2… d_k
- w:weights,(D,M),把这个长度是d的图片,输出的时候就变成M了
- b:bias,(M,) -> 这个bias会被broadcast到all lines
- (bias的值是最终分类的class的值,在不是最后一层的时候就是output的值),相当于一个class分一个bias(一列)
output
- output,(N,M)
- cache:(x,w,b)
implement
- 这里的实现直接reshape就可以了,-1的意思是这个维度上不知道有多少反正你自己给我算算的意思,但是需要N行是确定了的
- 注意这里验证的时候虽然input的是size,但是实际上是把数字填到这个里面的,所以取N的时候实际上是x.shape[0]
Affine layer:backward
input
- dout: upstream derivative, shape(N,M)
- cache: Tuple
- x
- w
- b
return
- dx: (N,d1,d2…,dk)
- dw:(D,M)
- db:(M,)
implement
- 注意这里用到的是链式法则:df/dx = df/dq * dq/dx
- 这里的df/dq就是已经求出来的dout
- q的式子是 Wx + b,对这三个变量分别求导,求出来大家的,别忘了求导之后的东西需要再乘dout
- 结果到底怎么算应该按每个矩阵的shape来推出来
ReLU activation
forward
- input:x,随便什么尺寸都可以,这部分只是计算relu这个函数
- output
- out,计算出来的结果
- cache,储存x,用来back的运算
- implement -> 直接把小于0的部分设置成0就可以了
backward
- input
- 返回回来的dout
- cache
- output: 计算出来的x的梯度
- implement:
- 求导,当原来的x大于0的时候,导数是1,链式法则是dout。小于等于0的时候是dout
- 所以直接对dout进行操作就可以了
1 | def affine_forward(x, w, b): |
sandwich layer
在文件cs231n/layer_utils.py里面,有一些比较常见的组合,可以集成成新的函数,这样用的时候就可以直接调用不用自己写了
loss layer -> 和assignment1里面写的内容是一样的
two-layer network
cs231n/classifiers/fc_net.py TwoLayerNet
init__
- 需要初始化weights和bias,weights应该是0.0中心的高斯(=weight_scale),bias应该是0,都存在self.para的字典里面,第几层的名字就叫第几
- input
- 图片的size
- hidden的个数
- class的数量
- weight scale,看初始的weights怎么分布
- reg,regularization时候的权重
forward
- 用前面已经写好的东西计算前向
- 最后得到scores
- 再用scores计算loss,注意 计算loss也是一层
- 计算loss的时候注意他这里loss的参数是scores和lable
backward
- back的时候不要忘记了loss也是一层,所以输入第二个sandwich的时候输入的应该是dscores而不是scores?!!!!
- 计算gradient,注意他的function里面已经除了总数!
- 别忘了加上L2的regularization
Solver
把之前那些训练啊,验证啊,计算accuracy之类的部分全都扔到一个class里面叫做solver,打开cs231n/solver.py
作用
- solver部分包括所有训练分类所需要的逻辑部分,在
optim.py里面还用了不同的update方法来实现SGD - 这个class接受training和validation的数据和labels,所以可以检查分类的准确率,是否overfitting
- 需要先构成一个solver的instance,把需要的model,dataset,和不同的东西(learning rate,batch,etc)放进去
- 先用train()来训练,然后model的para都存着所有训练完的参数
- 训练的过程也会记录下来(accuracy的改变啥的)
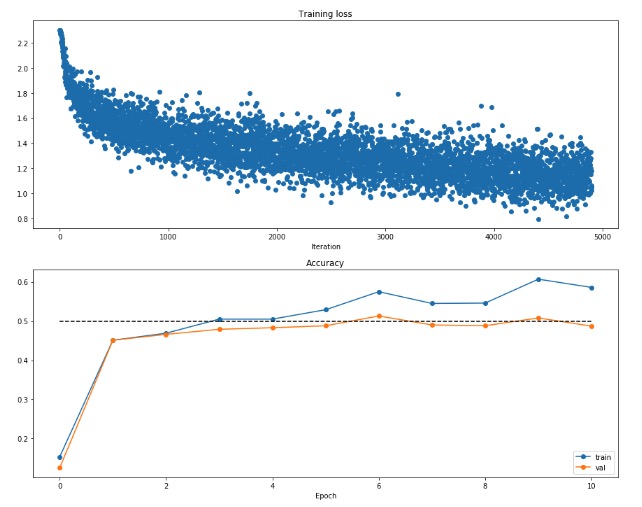
最后训练的结果大约在50%1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19model = TwoLayerNet()
solver = None
##############################################################################
# TODO: Use a Solver instance to train a TwoLayerNet that achieves at least #
# 50% accuracy on the validation set. #
##############################################################################
solver = Solver(model, data,
update_rule = 'sgd',
optim_config={'learning_rate': 1e-3,},
lr_decay=0.95,
num_epochs=10, batch_size=100,
print_every=100)
solver.train()
##############################################################################
# END OF YOUR CODE #
#######################################################################
可视化这个最终的结果,loss随着epoch的变化和training acc以及val acc的变化
1 | # Run this cell to visualize training loss and train / val accuracy |
记下来了这个loss和acc的history,所以就可以直接用来可视化了!
Multilayer network
现在开始实现有多层的net
- 需要注意的问题主要是数数数对了,注意数字和layer的数量的关系
- 为了保证验证的准确,需要把loss的regularization算对才可以
- 反向往回推的时候,可以用 reversed(range(a))这个东西来进行
- 总体来说和两层的差不多,就是加进来了for循环
1 | class FullyConnectedNet(object): |
检测网络是否overfitting
- 选择了一个三层的网络,小幅度改变learning rate和init scale
- 尝试去overfitting
出现了一些问题不是太能overfitting我不知道为什么
update rules
在得到了back出来的dw之后,就需要用这个dw对w进行update,这里有一些比较常见的update方法
普通的update
- 仅仅沿着gradient改变的反方向进行(反方向是因为计算出来的gradient是上升的方向)
x += - learning_rate * dx
SGD + momentum
http://cs231n.github.io/neural-networks-3/#sgd
是对这个update一点物理上比较直观的理解(其实名字叫做动量)
- 可以理解为这个东西是在一个平原上跑的一个球,我们需要求的w是这个球的速度,得到的dw是这个球的加速度,而这个球的初速度是0
- 可以理解为这个球找最低点的时候,除了每步按dw update,还在上面加上了前面速度的影响,也就是加上了惯性!
1
2
3# Momentum update
v = mu * v - learning_rate * dx # integrate velocity
x += v # integrate position
Nesterov Momentum(NAG)
- 在原来的基础上:真实移动方向 = 速度的影响(momentum)+ 梯度的影响 (gradient)
- 现在:既然我们已经知道了要往前走到动量的影响的位置,那么我根据那个位置的梯度再进行update,岂不是跑的更快!
- 总的来说就是考虑到了前面的坡度(二阶导数),如果前面的坡度缓的话我就再跑快点,如果陡的话就跑慢点
1
2
3v_prev = v # back this up
v = mu * v - learning_rate * dx # velocity update stays the same
x += -mu * v_prev + (1 + mu) * v # position update changes form
cs231n/optim.py
- 加入了新的计算update的方法
- 具体的原理还没有看,但是计算就是这样计算的
1 | def sgd_momentum(w, dw, config=None): |
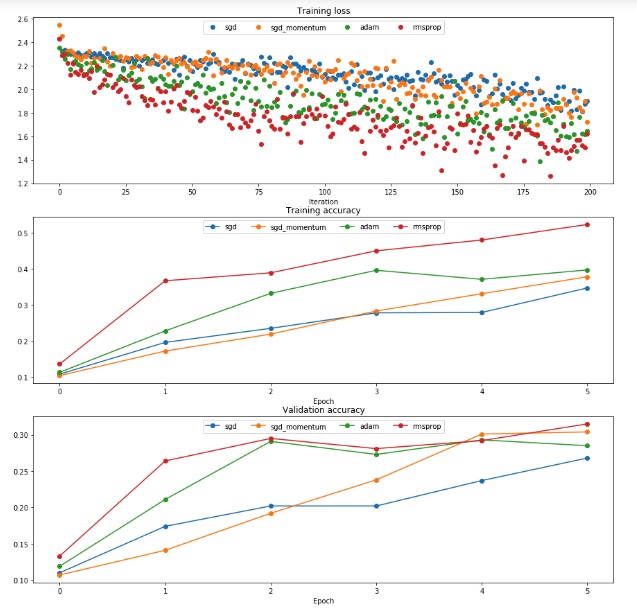
- 可以看出来最终的结果会比普通的SGD上升的更快
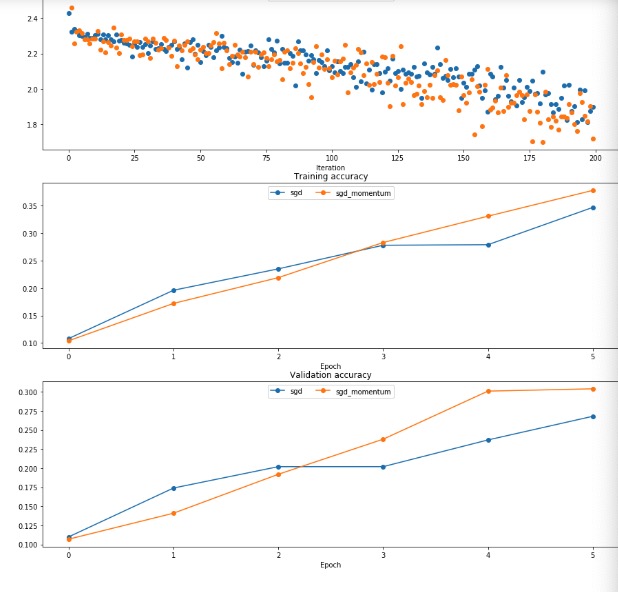
分别又尝试了RMSProp and Adam