target
- 之前已经实践了fc的相关东西,但是在实际的使用里大家使用的都是CNN
- 所以这部分就开始实践CNN了
convolution: Native forward pass
- CNN的核心部分就是卷积
- in
cs231n/layers.py,conv_forward_naive 首先这时候不用考虑效率问题,最轻松的写就可以了
输入的数据是N个data,每个有C个channel,H的高度和W的宽度
- 每个输入和F个不同的filter做卷积,每个卷积核对所有的channel作用,卷积核的大小是HHxWW
input
- x, (N,C,H,W)
- w, fliter weights of shape (F,C,HH,WW)
- b, bias, (F,)
- conv_param: dict
- “stride” 步长
- “pad” zero-padding的大小
注意在padding的时候不要调整x,而是得到一个padding之后的新的东西
output
- out, (N,F,H’,W’)
- H’ = 1 + (H + 2 * pad - HH) / stride
- W’ = 1 + (W + 2 * pad - WW) / stride
- cache: (x,w,b,conv_param)
implement
- 首先需要对输入的图片进行padding
- np.pad
- 输入的array
- pad的宽度,如果默认的话就是前后都加,然后是这个数字的宽度 -> 注意这里的时候因为一共有四个维度,前两个维度是不用pad的
- mode = ‘constant’
- constant_values,表示的是pad进去的值,可以前后pad的不一样,因为这里是0-padding所以这里是0
- np.pad
- 要对所有图片进行处理,需要在N个图片里选择一个
- 在filter的所有里面选择一个
- 考虑在H方向和W方向的移动步数,然后通过这个步数和步长的乘积在原图里面取需要做卷积的部分
- 注意这里可以不用考虑channel,因为图片和filter的channel是同样的层数,所以直接可以boardcast
- 然后这个部分和卷积核相乘(直接乘),求和,加上bias,就是这个像素点上应该的数值
1 | def conv_forward_naive(x, w, b, conv_param): |
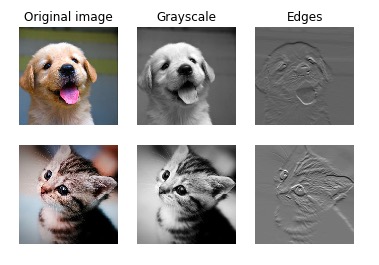
可视化中间的图像过程
- 这里输入了两个不同的输入图片
- 分别可视化了这个图片的不同weights
Convolution: Naive backward pass
愉快的简单计算back的过程,先不用考虑cost
input
- dout
- cache(x,w,b,conv_param) -> 参数是padding 和 stride
output
- dx
- dw
- db
实现:conv是怎么求导的?
其实排除位置的改变之外,forward只进行了三个操作
- 把x padding为x_pad
- wx_pad_conv + b -> 求出一个大小和filter相同的矩阵
把求出来的一个(HH,WW)的矩阵的所有值求sum
backward的思路
- 首先,每一张图片的每一个channel的,dout的大小和输出图片的大小一样
- 应该是
H_out = 1 + (H + 2 * pad - HH) // stride这样求出来的结果 - 整个dout的size是(N,F,Hout,Wout),其中N是之前图片的数量,F是新形成的图片的channel
- 所以在for循环中,dout中选中[n,f,hout,wout],就可以得到这个特点定的值,称为df
- 应该是
- df的得到方法是wx+b得到一个矩阵,然后再对这个矩阵求和
- 因为求和实际就是累加,求导数的时候只要把每一个格子的dx,dw,db导数求出来,然后加在一起就行了
- 因为公式就是wx + b,所以dx是w,dw是x,db是常数 -> 然后再把每个格子求出来的加在一起,注意各个矩阵的大小,dx应该是在x矩阵里取做卷积的部分,这部分的导数等于w乘df的和
- 最后,因为x被padding了,dx应该去dx_pad中没有被padding的部分,也就是从[pad:pad + H]
- 首先,每一张图片的每一个channel的,dout的大小和输出图片的大小一样
代码如下
1 | def conv_backward_naive(dout, cache): |
Max-Pooling:Native forward
input
- x, (N,C,H,W)
- pool_param -> dict
- ‘pool_height’
- ‘pool_width’
- ‘stride’
- 不需要进行padding
output
- out, (N,C,H’,W’)
- H’ = 1 + (H - pool_height) / stride
- W’ = 1 + (W - pool_width) / stride
- cache(x,pool_param)
实现
- 直接找到相应的块然后求max
- 注意求max的时候要注意axis,我们需要求得是在一张图片每个channel上面的最大值,在这个式子里面因为已经确定了pics的值,实际上的out其实是一个三维的数组,所以应该求axis = (1,2)上面的最大值,而不是求(2,3上面的)
代码
1 | def max_pool_forward_naive(x, pool_param): |
Max-pooling: Native backward
input
- dout, size = (N,C,W_out,W_out)
- cache
output
- dx, size = (N,C,W,H)
实现
- max的值在实际上是一个router,local gradient对于最大的值的地方是1,其他值的地方影响是0
- 需要找到x里面值等于最大值的坐标,然后把这个坐标的dx改成对应dout的值(因为链式法则应该dout * 1),其他地方的dx都是0
- 关于找到这个点的坐标
- 我用了显得很傻的方法,在x的范围里面找到这个范围里最大的坐标,用了很多圈循环
- 实际上可以从max的值找到原来的坐标
- numpy.unravel_index(indices, dims)
- 结合np.argmax,返回最大值的坐标 -> ind = np.unravel_index(np.argmax(a, axis=None), a.shape)
- 这样的话找到的是在每个max的框框里最大值的坐标,在这个框框的范围里找到这个坐标就是需要改变的地方
1 | def max_pool_backward_naive(dout, cache): |
Fast layers
- 在
cs231n/fast_layers.py里面直接提供了比较快版本的计算方法
The fast convolution implementation depends on a Cython extension; to compile it you need to run the following from the cs231n directory:
1 | python setup.py build_ext --inplace |
记得重启一下jupter
1 | Testing conv_forward_fast: |
可以发现fast版本conv的速度会快300倍,而pooling也会快几十倍
conv sandwich layer -> 已经写好了,conv + relu + pool
Three-layer ConvNet
cs231n/classifiers/cnn.py,implement一个三层的CNN结构
- conv - relu - 2x2 maxpool - affine1 - relu - affine2 - softmax
- 输入图片的minibatch为(N,C,H,W)
init
- input_dim: (C,H,W)是每张图片长什么样子
- num_filters: conv层里面filter的个数
- filters_size,直接把高和宽统一成一个数字了,反正都是方形的
- hidden_dim:用fc层的数量
- num_classes: 最后输出的class的数量
- weight_scale:初始化的时候的scale
- reg:L2
- dtype:计算所用的datatype(如 np.float32)
loss + gradient
- 需要初始化三层的参数,W123和b123
- 初始化weights(正态分布)和bias(全是0) -> 注意fc和conv层的不一样
因为在loss中有帮助input的大小保持的操作,所以第二层的图片可以不考虑padding和stride的变化
W1的大小是filter的大小(F,C,HH,WW),需要filter的数量,channel的数量,以及每个filter的大小,b1是(filter,)
- conv_relu之后进行了一次max pool,所以图片的大小缩小了一半
- 后面两个affine的大小就跟输入,hidden_num和最后的num_classes有关系了,b的大小跟输出走
- 注意第二个affine之后不需要relu
- loss用之前写好的softmax
- 注意需要regularization
- 直接用之前写好的把gradient back回去就可以了
Sanity check loss¶
在建立一个新的net的时候,第一件事就应该是这个
- 用softmax的时候,我们希望random weight,没有reg的结果是log(C)
- 如果加上了reg,这个数量会轻微增加一点
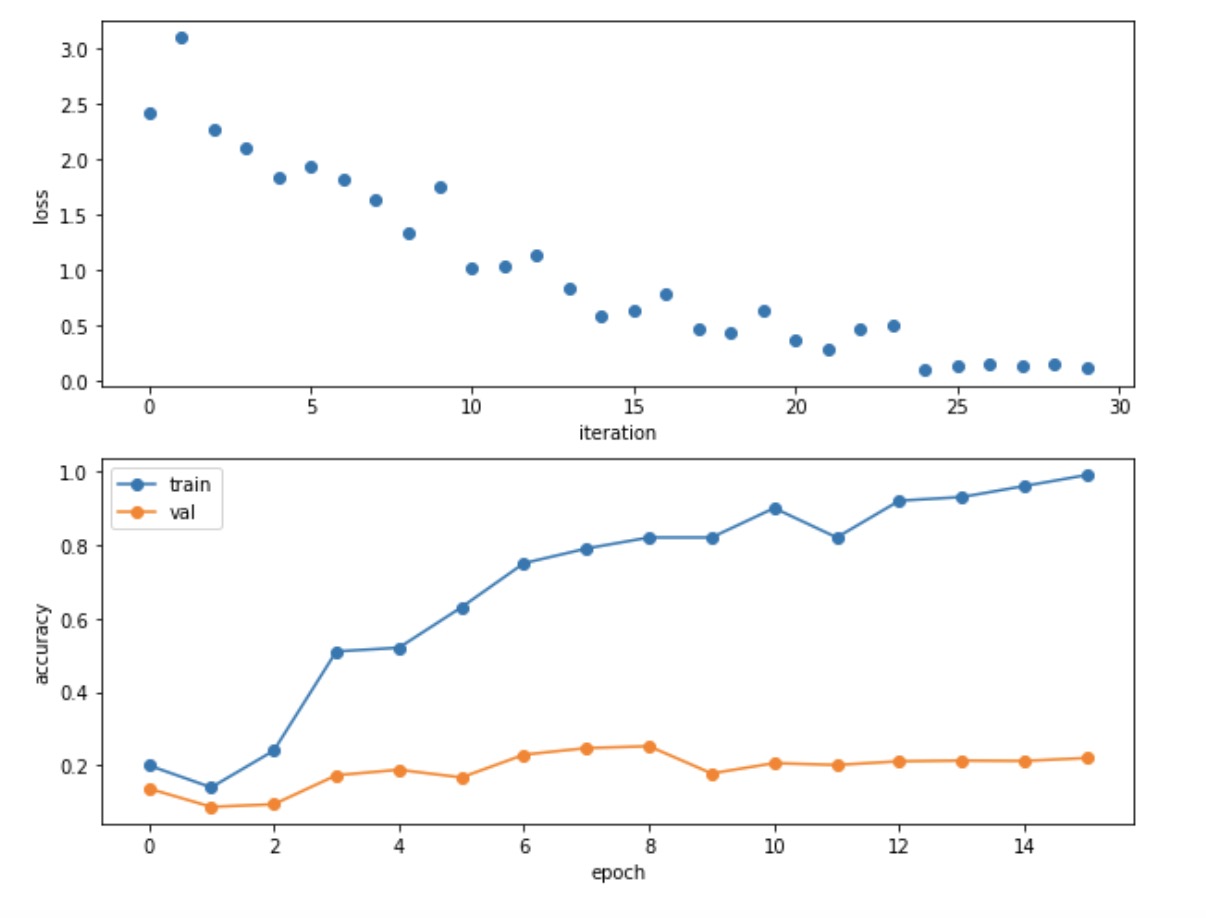
overfit small data
- 直接用非常少的数据来训练一个新的网络,应该能在这个上面overfit
- 应该会产生一个非常高的训练精度和非常低的val精度
- 注意在loss里面的时候需要记录下来scores,我就是因为变量名写错了所以一直bug
- 最后训练出来的train_acc接近100%,而val_acc只有百分之20
1 | np.random.seed(231) |
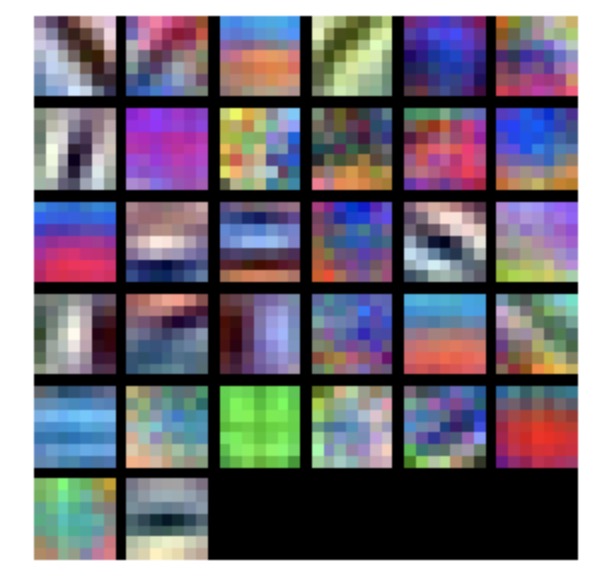
训练这个三层的网络
- 直接用所有数据训练这个网络,应该得到的train_acc应该在40%
- 最后训练了1个epoch,980次iter
1
(Epoch 1 / 1) train acc: 0.496000; val_acc: 0.489000
可视化第一层的filter
Spatial Batch Normalization
- 在之前我们已经看到BN对于训练NN很有用了,根据15年的一个论文,CNN里面也可以用BN -> SBN
- 普通的BN会接收(N,D)大小的input,并且output是同样的大小,normal的时候用data的总数N
- CNN里面,input为(N,C,H,W),output大小相同(也就是和X同样尺寸)
- 如果用卷积得到的特征map,we expect the statistics of each feature channel to be relatively consistent both between different imagesand different locations within the same image -> 所以在SBN里面,计算对每个C里面的特征计算mean和var
Spatial batch normalization: forward
cs231n/layers.py
input:
- x,(N,C,H,W)
- gamma,scale parameter (C,)
- beta,shift param (C,)
- bn_param: dict
- mode: train/test
- eps
- momentum
- running_mean
- running_var
output
- out,(N,C,H,W)
- cache, back的时候需要的东西
注意,可以调用之前写的关于 batchnorm_forward 的内容,代码应该少于五行
- 这里需要用到多维数组的转置,需要把矩阵变成(N H W) * C的格式,然后在求完bn之后再转回去
- 之前fc里面使用的时候的大小是(N,D),这样的话是在所有的N上面取平均
- 这里的C代替了以前的D,NHW代替了以前的N(把每张特征图看做一个特征处理(一个神经元),这里的特征图指的是一层的东西)
- 这里用到的是一张特征图里面的所有神经元的参数共享
Spatial batch normalization: backward
- 输入dout(N,C,H,W)和cache,输出dx,dgamma和dbeta
- 同样也是直接调用之前的,变形方法和之前一样
Group Normalization
- 同样原理,把维度变化之后使用
- np.newaxis()