camera models & calibration
物体会吸收一部分的光,然后反射一部分的光,反射的光就是他自己的颜色,这个光被我们的眼睛(或者相机)接收,然后投影到我们的视网膜(或者相机的图片)上,这之间的几何关系在CV上面非常重要
其中一个非常简单的模型就是pinhole camera model。光穿过一面墙上的一个小的aperture,这个是这章的模型的开始,但是真实pinhole模型不是很好因为他不能快速曝光(聚集的光不够)-> 眼睛会更厉害一点,但是len还会distort图片。
这章的目的:
- 如何camera calibration
- 纠正普通的pinhole模型的len的偏差
- calibration也同样是获取三维世界的主要方式,因为一个场景不仅仅是三维,他们还有物理的空间和体积,所以获取pixel和三维诗句坐标的关系也很重要
- 18章纠正的是len的distortion,19章构建整个3D的结构
homography transform -> 一个非常重要的要素
camera model
- 投影到image plane上面,结果在这个plane上面总是对焦的focus,图片的大小和这个焦距的长度有关
- 对于理想的pinhole来说,image plane到pinhole的距离就是准确的焦距
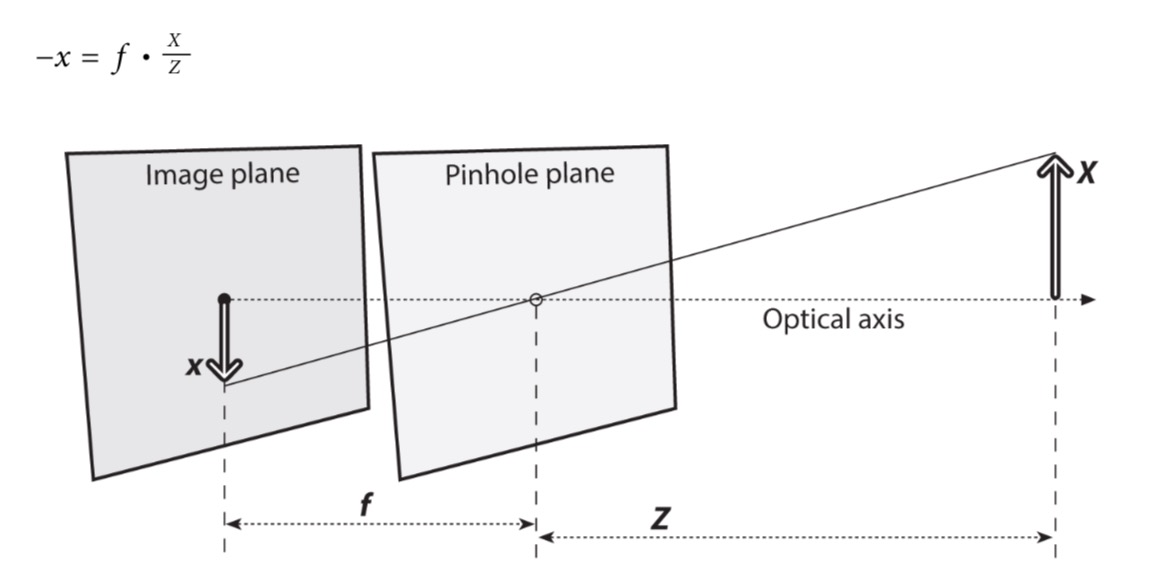
- 从这个基础的模型上 -> 得到一个计算起来更加简单的模型
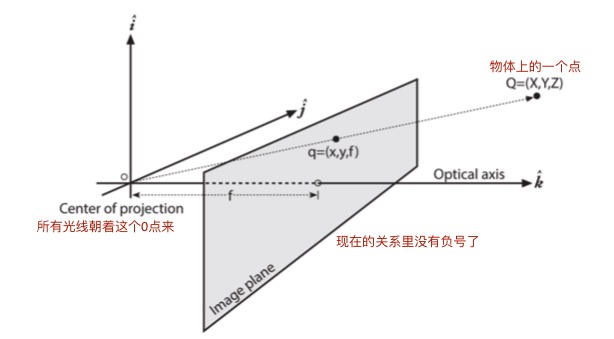
- 交换pinhole和projection plane的位置
- 现在pinhole的位置变成了projective plane的中心
- 每一个离开物体表面(Q)的光线都朝着projection center走
- 在横轴和投影面上的交点被定义为principal point
- 这个新的平面和以前的projective平面一样,上面投影上的物体也都是和原来一样的尺寸
- 换了模型之后没有了负号:x/f = X/Z
- 在理想的模型里可能觉得这个principal point就是image的中心,但是实际上中心不会在横轴和投影面的交点上
- 引入了两个新的参数 cx 和 cy
- 这两个参数实际上就是中心点的偏差(平面上的偏差),所以得到投影在image plane上面的实际坐标如下
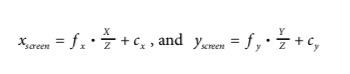
- 在上面的公式里面用了两个不同的f,fx和fy,这是因为
- 在实际的图片里来说,其实每个像素格不是正方形而是长方形的
- fx = 实际的focal length * sx(每个mm里面的像素数量) -> 最终得到的fx是像素格
- 注意:
- sx和sy在calibration的时候并不能直接测量
- physical focal length也不能被实际测量
- 我们只能得到这两个东西的乘积,f
- 在实际的图片里来说,其实每个像素格不是正方形而是长方形的
basic of projective geometry
- projective transform -> 把physical world里面的一组点Qi(Xi,Yi,Zi)map到一张图片上面(xi,yi)的过程
- 用这个东西的时候,一个比较方便的方法是用homogeneous coordinates
- associ‐ ated with a point in a projective space of dimension n are typically expressed as an (n + 1)-dimensional vector (e.g., x, y, z becomes x, y, z, w), with the additional restric‐ tion that any two points whose values are proportional are, in fact, equivalent points
- 投影平面上面的维度是两维,我们可以把它表示成三维的东西 -> 把现在存在维度的数字除以增加的维度的值就可以得到以前的值
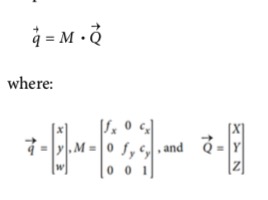
- 用这种办法,可以把之前的fx,fy,cx,cy重新组织成一个矩阵:camera intrinsics matrix
- 下面这个形式重新乘回来就是之前的关系
- 用这个东西的时候,一个比较方便的方法是用homogeneous coordinates
在opencv里面也有得到homogeneous coordinates和由结果反推回来的函数
注意,在pinhole里面的成像速度是非常慢的,如果需要更快速地形成图片,我们需要通过lens来聚焦非常广范围里面的光 -> 但是结果就是lens会产生distortion
Rodrigues Transform
- 在三维的范围里,经常会使用一个3x3的矩阵来表示一个物体的旋转
- 只要把需要旋转的vector乘上这个mat就可以得到相应的结果
- 但是不是很好直观的得到这个旋转矩阵
- 介绍一种在opencv里面的表示方法 -> 更容易直观的理解意思
- 本质上来说就是用一个vector表示每个角度上需要旋转多少
- Rodrigues Transform指的就是矩阵表示法和向量表示法之间的关系
- 数学原理:余弦定理?(知道两个向量可以求出来他们之间的角度)
- 这两个关系之间可以很轻易的互相转化,opencv里面也有相应的库
lens distortion
- 在实际使用中因为制造球形的镜头更容易一些,并且很难测量是不是平的,所以lens都会产生distortion
- 在这部分介绍了两种主要得distortion,how to model
- radial distortion -> 镜片的形状产生的
- tangential distortion -> 组装整个相机的时候产生的
radial
- 相机的distortion一般都会产生在接近imager边缘的部分(fisheye effect)
- 远离lens中心的部分比起中心部分会折叠更多,所以如果投影一个正方形,边的部分都会鼓起来
- 如果相机比较便宜的话(web camera),周围的折叠会更多,而好的相机会更注重减少radial distortion的效果
- 对于辐射的畸变来说,distortion会随着接近边边而增加
- 在实际中这个畸变很小,所以可以用泰勒级数的r=0附近展开来解决
- 对于比较便宜的web camera,可以选用k1或者k2
- 对于鱼眼这种畸变很大的,可以用k3
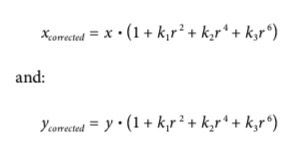
- 在distort之后的位置可以用以下的公式表示
- (x,y)是原来的位置,corrected是教政治和的位置
- r是离开中心的半径
tangential
- 在制造相机的时候,lens和image plane没有完全平行导致的,所以投影上去会是一个几何变换
- 这个distortion基本是由两个参数组成:p1和p2
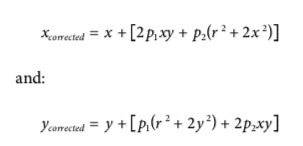
- 总结下来,在相机的distortion里一共有五个参数,k1k2k3p1p2,这五个函数构成了一个distortion vector(5x1)
- 虽然在图像里面还有一些其他的畸变,但是因为影响没有这两个大所以opencv没有考虑这部分
calibration
- 上一部分得到了如何表示相机的参数以及distortion的参数
- 这部分考虑如何计算这些参数
- 其中一个函数
clibrationCamera()- 用相机去照一个已经知道结构的东西,里面有很多已经定义好了的点
- 通过这个可以得到相机的相对位置和角度,同时也可以得到intrinsic parameters
平移矩阵和旋转矩阵
- 对于每张照的图片的物体,这个物体的pose可以用一个旋转矩阵+一个平移矩阵描述,也就是用这个矩阵把现实世界中的点转化到投影平面上
旋转矩阵
- 旋转运动无论在多少维都可以被描述为:一个坐标的vector乘对应大小的方阵 -> 用一个新的坐标系来描述这个点的位置 -> 其实也就是改成了极坐标系?
- 三维范围里面的旋转可以用两个角度表示
- 绕着x,y,z三个方向旋转的角度以及对应的矩阵是这个样子的

这三个方向的R乘在一起就是最后的旋转矩阵R,但是这个的方向是反着的,所以还需要一个transpose转回来
平移矩阵
- 平移矩阵用来描述怎么从一个坐标系统shift到另一个坐标系统 -> 也就是一个从第一个坐标系原点到第二个坐标系原点的offset
- 在calibration的时候,就是从物体坐标系的原点到了相机坐标系的原点
- 平移矩阵:
T→ = origin_object − origin_camera.
综合
- 结合上面两个矩阵来说,从object上面的一个点投影到camera plane上面的一个点的关系为
Pc→ =R⋅(Po→ −T→)注意分清楚这里面的矩阵和向量
- 把上面的这个公式,再加上camera自己的intrinsic-correction。整体就是opencv里面需要求的所有部分
- 所求参数
- 三维的旋转用三个角度表示,三维的平移用三个parameter表示(x,y,z) -> 现在得到了6个参数
- 相机的intrinsic mat(fx,fy,cx,cy) -> 一共四个参数
- 现在一共需要求10个参数(但是相机的intrinsic是不变的)
- 求参数 ->
- 在求解的时候,如果使用一个平面物体,那么每张图片都可以得到8个参数(位置的6个会随着图片变化 + 只能用两个参数来求intrinsic)
- 至少需要2张图片来得到所有的参数
calibration boards
- 从原则上来说,任何有特征的东西都可以被用来calibration,包括棋盘,圆格,randpattern,arUco等等,有些方法是基于三维的物体的基础上的,但是二维平面的物体更好操作
- 在这里主要选择的是用棋盘进行calibration
关于chessboard的函数
cv::findChessboardCorners()
- 可以用这个函数找到棋盘的corners,
- param
- 需要输入8bit图片
- 需要输入这个棋盘每行每列应该有的格子数(计算的是内部点)
- 输出的是这么corner的坐标
- 可选flag决定需不需要多余的filter
cv::cornerSubPix()
- 上面一步找到的只是corner的大概位置
- 在find corner里面自动call了这个函数,为了能得到更精确的结果
- 如果需要得到更精确的结果,可以重复的call这个函数,但是会有tighter termination criteria
cv::drawChessboardCorners()
- 为debug用,更明确的画出来找到的corner
- 如果没有找到所有的,会把其他可能的用红色circle画出来,如果找到了,每一行的颜色会不一样
下一步转到perspective transform,这个transform会形成一个3x3的homography mat
关于circle grid的函数
cv::findCirclesGrid()
- 和上面的棋盘没有什么本质的区别,主要就是画出来一个是黑白格,另一个是白色的背景上面有黑色的圆点,输出小圆点的位置
- 这个方法需要圆点是对称的,上下一组算做一行,竖着一列算一列,怎么数非常重要
Homography
- planar homography是一个平面到另一个平面的projection mapping,所以从一个2D平面到相机平面的过程就是一个planar homography
- 用矩阵的乘法就可以表示这个过程
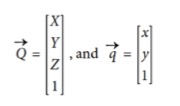
其中Q是现实中的点,q是成像器上面的点,整体关系为:q→ = s ⋅ H ⋅ Q→
- s,一个随意的scale参数,homography就是由着一个参数决定的
- conventionally factored H, H由两个部分组成
- physical上面的transformation,实际就是我们看到的这个物体的位置W = [R,t→]
- projection,取决于相机的intrinsic
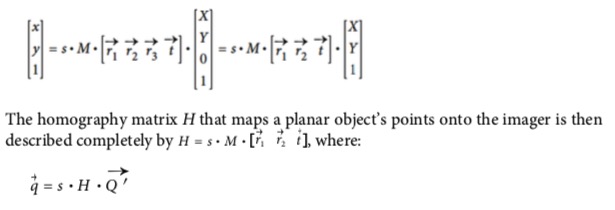
q→ = s ⋅ M ⋅ W ⋅ Q→,其中M是相机的intrinsic mat我们希望Q不是给所有空间定义的点,而是一个定义在我们看的平面上面的坐标,这样计算起来会方便(三维转二维)
- 所以把Q里面的Z的坐标改成了0,这样旋转矩阵就会被简化为一个3x1的列
- 并且第三个列乘了Z的0之后就被消掉了
- 最后就可以把H表示出来了 -> 3x3 = intrinsic(3x3) x (rota + trans)(1x3)
在计算homography mat的时候,用了多张同样内容的东西来计算translation和intrinsic
- 三个旋转,三个平移 -> 每张图片有6个未知的参数
- 每张图片可以得到8个等式
- 把一个正方形mapping成一个四边形可以得到4个不同的(x,y) points
- 所以每多一张图片就可以多出来计算两个新的参数的机会
- 这样看,
pdst→ = H * psrc→,反着也可以推回来,这样我们就算不知道M也可以计算H,或者说我们是用H来计算M
- 在opencv里面,
cv::findHomography()可以用take一堆有关系的点然后返回他们之间的homo mat,点越多计算的越准确 - 虽然有其他的方法可以计算结果,但是对测量误差不是很友好
three robust fitting methods
method to cv::RANSAC- 随机的选择提供的点的subset,然后只用这些subset来计算homo mat
- 然后把剩下的数据拿来计算一下靠谱和不靠谱的
- 最后保存最有潜力的inliers
- 在现实中比较好用,可以过滤掉一部分噪音
- LMeDS algorithm
- 减少median error
- 不需要更多的info和data来运行
- 但是it will perform well only if the inliers constitute at least a majority of the data points
- RHO algorithm
- 加权的第一种方法,运行速度更快
camera calibration
棋盘corner个数
- 到底有多少参数
- camera intrinsic 四个
- distortion五个(或者更多)三个辐射(可以增加到6个) + 两个平移
- 这五个参数是从2D -> 2D的
- 三个corner points可以得到6个信息,足够处理这五个参数
- 所以一张图就够了(只是原则上这么说)
- extrinsic parameters,这个东西的实际位置
- 但是因为intrinsic和extrinsic之间有对应的关系,一张图片并不够 -> 因为在一张图片里还需要计算extrinsic的部分
- 假设有N个corner,一共有K个images(不同的position)
- 一共会有 2 N K个,2是x,y的坐标会有两个,然后N个corner,K个图片
- 暂时忽略distortion的参数,这样需要4个in和6K个ex(因为每张图片的ex都是不一样的)
- 2NK >= 6K + 4
- 如果N = 5,只需要一张图片就可以解决。但是为了得到homo mat,至少需要两个K(之前说到过的)
- 无论检测到多少corner,得到的有用信息就是四个角 -> 由此推测至少两个K
- 如果N = 5,只需要一张图片就可以解决。但是为了得到homo mat,至少需要两个K(之前说到过的)
- 在实际的应用里面,一般需要7x8,至少十张图,这样受到noise的影响更小
具体的数学计算
- 为了简单,首先假设在calibration的时候根本没有distortion
- 对于每个view,会得到一个Homo mat,把这个mat拆成一个列向量(3x1)
- 在前面也知道H可以拆成M和一个[r1,r2,t]的向量相乘,再乘上一个scale s
H=[h1,h2,h3] =s⋅M⋅[r1,r2,t],其中landa是1/s: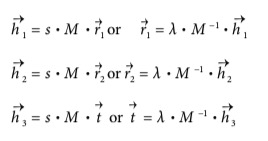
- 旋转向量的基底(orthogonal)是互相垂直的,因为已经把scale这个参数提出去了,所以可以直接认为r1和r2是基了,这样的话他们的点乘是0
- 把r1和r2用M和h来表示,这样的话r1r2等于0就可以转化成一个hM的公式
- r1和r2的模也相等,所以可以继续得到一个等式
- 设置一个矩阵B等于M.-T * M-1,这样可以计算出来B的值(B算出来是对称的)
- 把B带回原来的等式,化简,然后把K个等式叠加在一起
- 这样就可以推出来几个参数的表达式
calibration的函数
cv::calibrateCamera().来解决calibration的问题
- 得到的结果包括in mat, dis_co, 旋转向量和平移向量
- 输出的in mat的大小是3x3
- 输出的dis_co的大小取决于用多少级的distortion,一般来说是4,5个的已经对fisheye足够了,8个的话calibration的精度就特别高了
- 如果需要高精度的calibration的话,需要的图片数量也会疯狂增加
- 输入的部分包括
- 物体的坐标,指的是在chessboard上面的坐标点,是二维的点,其实也就是第几个格子?
- 注意这里,统计的单位是格子,所以如果想要得到physical上的距离,需要在calibration board上量出来一个格子的长度,然后乘这个格子的数量
- image上面的坐标,corners
- 物体的坐标,指的是在chessboard上面的坐标点,是二维的点,其实也就是第几个格子?
- 一口气计算所有的参数不是很好实现,一般使用的方法是先固定一部分计算另一部分,然后再固定另一部分计算这一部分。当所有的东西都估计的差不多了,再一起计算
- 最后还有一个参数是termination criteria,终止的基准 -> epsilon 会根据一个error来计算是否终止
只计算extrinsic
cv::slovePnP()
- 有的时候我们已经得到了相机的intrinsic,只希望得到object的位置
- 大部分内容和上面都是一样的,除了
- 物体的位置只需要一个view
- distCo和intrinsic都是自己设置好的,不需要计算
cv::solvePnPRansac()
- 上面的函数对于outliers的robust效果不是很好,对于chessboard来说,这个robust不是很重要,因为棋盘自己本身已经很可靠了。但是对于现实世界中的物体来说不是这么可靠
- 加入了RANSAC部分?
Undistortion
- 在calibration里面有两个需要解决的事情,一个是distortion,一个是三维表达的正确性
- opencv自己有一个可以用的方法
cv::undistor()-> 可以一瞬间完成cv::initUndistortRectifyMap()+cv::remap()-> 在video上面使用的时候效率更高一些
undistortion map
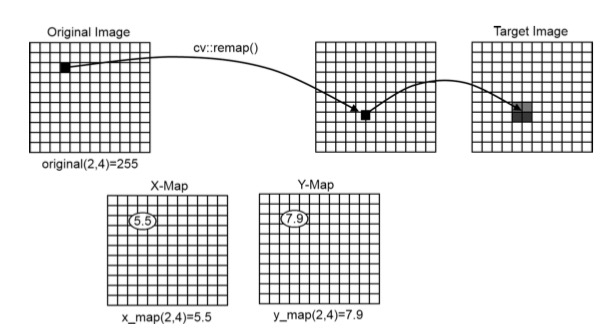
- 在把一张图片undistort的时候,我们需要把每个像素都对应到output里面对应的地方去,有几种不同的表达方法
- 2-channel float
- 有一个对于NxM的remapping,表示成NxM的array,有两个channel(分别对应X和Y方向的remap),里面是浮点数
- 对于每一个输入的像素位置(i,j),有一个对于这两个位置的向量,来表达这两个量应该哪里去
- 如果计算出来的结果不是一个整数,那么用interpolation来计算最后应该占的格子的数量
- 第二种表达式是 2-array float,每一个array是一个channel的移动
- 第三种是fixed point,计算的速度更快一点,但是需要提供的信息的精确度更高
- 2-channel float
cv::convertMaps()
- 因为有上面的三种不同的表达形式,所以这个函数用来在各个形式之间转变
cv::initUndistortRectifyMap()
- 从刚才的部分知道了到底什么是undistortion map,现在开始讨论如何计算这个map
- 现在先从单目相机开始monocular,如果双目的话可以直接计算depth(下一章)
- 步骤,分开是因为计算map只需要一次
- 先计算undistortion map
cv::initUndistortRectifyMap()- 输入的参数是intrinsic mat和distortion coefficient(从camera calibration得到的)
- 可以得到一个新的camera mat,这样的话即使不undistortion也可以得到正确的图片(在多个相机的calibration的时候比较重要)
- 最后会输出两张map
- 然后在图片上undistort
- 先计算undistortion map
cv::remap()
- 当计算了上面的map之后,就可以用remap这个函数进行校正了
- 输入的map的种类也是上面提到的三种都可以
cv::undistort()
- 如果只有一张图片,或者对于每张图片都需要重新计算map的时候,就需要用这个函数了(所以在项目里面用这个的速度会变慢)
sparse undistortion cv::distortionPoints()
- 如果我没有整张图片,只有一些图片上的点,然后我只关心这些图片上的点,可以用这个函数计算这张图片上面关注点的位置