Chapter 19
首先会讨论从3D得到2D信息,然后再讨论从2D推断3D信息
如果没有多张图片是很难得到靠谱的3D信息的:
- 通过stereo vision
- 通过motion
Projections
- 得到了物体在三维里面的位置之后,因为我们在18章已经calibration了相机,所以可以得到这个点在图片里面的位置
- 提供了一个函数projectPoints来投影一系列的点,针对刚体
- a list of loca‐ tions in the object’s own body-centered coordinate system
- 加上了平移和旋转,相机intrinsic和distortion
- 最后输出在画面上的店
Affine and Perspective Transformations
affine是针对一个list或者一整张图片进行的,可以把一个point从图片的一个location移动到另一个location,perspective trans更多的是针对一个矩形图片 -> related to prspective transformation
总结不同的函数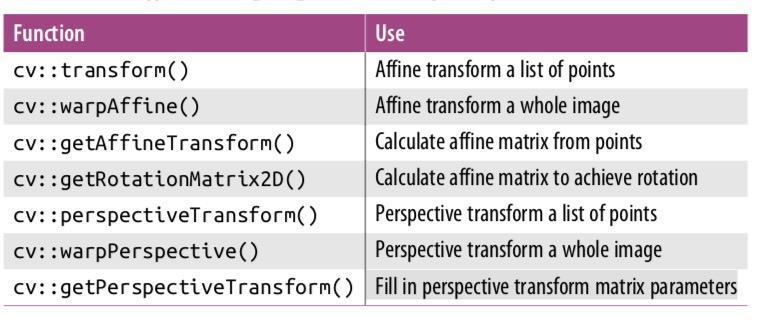
Bird’s-eye-view trans(p699)
- 在robtic巡航的时间,经常把排到的画面变成从上往下看的bird-view
- 需要相机的intrinsic和distortion (把棋盘放在地上进行calibration)
- 步骤
- 首先读取相机的参数和distortion model
- 找到地面上已知的店(比如chessboard),找到至少四个点
cv::getPerspectiveTransform()计算地面上已知点的homography Hcv::warpPerspective()形成bird-eye-view
three-dim pose estimation
物体的三维pose可以从
- 一个相机:必须先考虑情况惹
- 多个相机捕捉:从多个不同图片来推断,这样即使是不知道的东西都可以操作
single camera
- 如果我们知道一个object,我们需要知道这个东西在他自己坐标系里面关键点的坐标
- 如果现在给了一个新的view point,可以根据关键点的位置来推断
cv::solvePnP()
- 用来计算一个know object的位置
- 从图片里面提取特征点,然后计算不同点的位置,这个问题的解是应该是唯一的
- PNP问题不是每次都有唯一的解
- 如果没有足够的关键点,为了保险起见应该有足够的店
- 或者当物体离得特别远(这时候光线接近于平行了,就不好判断了)
总的来说,单目视觉和人自己的眼睛(单只)看东西的感觉差不多,不能获得精确的大小,还会产生一些错觉(比如把大楼的窗户设计的小来显得楼更高)
Stereo Imaging
在电脑中,通过计算在两张图里面都出现的点的位置来计算,这样就可以计算这个点的三维位置。虽然这样计算的计算量很大,但是可以通过一些方法来压缩搜寻的范围,从而得到相应的结果。
主要分为4步:
- 在数学上remove掉相机lens的辐射和平移distortion -> undistortion
- 调整相机之间的角度和距离 -> rectification。这一步输出之后的两张图片应该是row-aligned的(frontal parallel)
- 找到左右两张图相同的feature -> correspondence。这一步的输出是一个disparity map,输出的是两个图中相同特征点的x坐标方向上面的disparity
- 最后可以把disparity转换成triangulation,这一步叫做reprojection,这样输出的就是depth map了
triangulation(找到disparity和depth的关系)
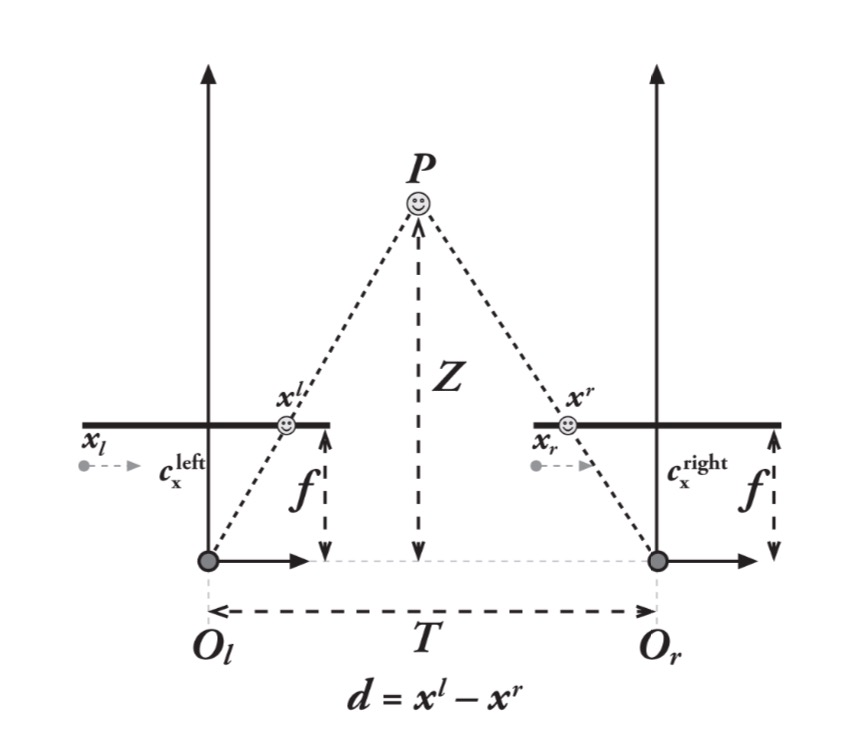
- 整体概念如上图所示,在这张图里我们假设系统已经完全undistort,aligned(两张图片的行和行对上了)了,两个相机的平面完全相同,焦距也相同,并且两个相机的cx已经被calibrated好了(相同)
- 这时,这个物体点P的depth和disparity是成正比的,求出来的disparity是:xl - xr(xl和xr都是根据各自的相机中心的坐标):
T - (xl - xr)/Z - f = T/Z
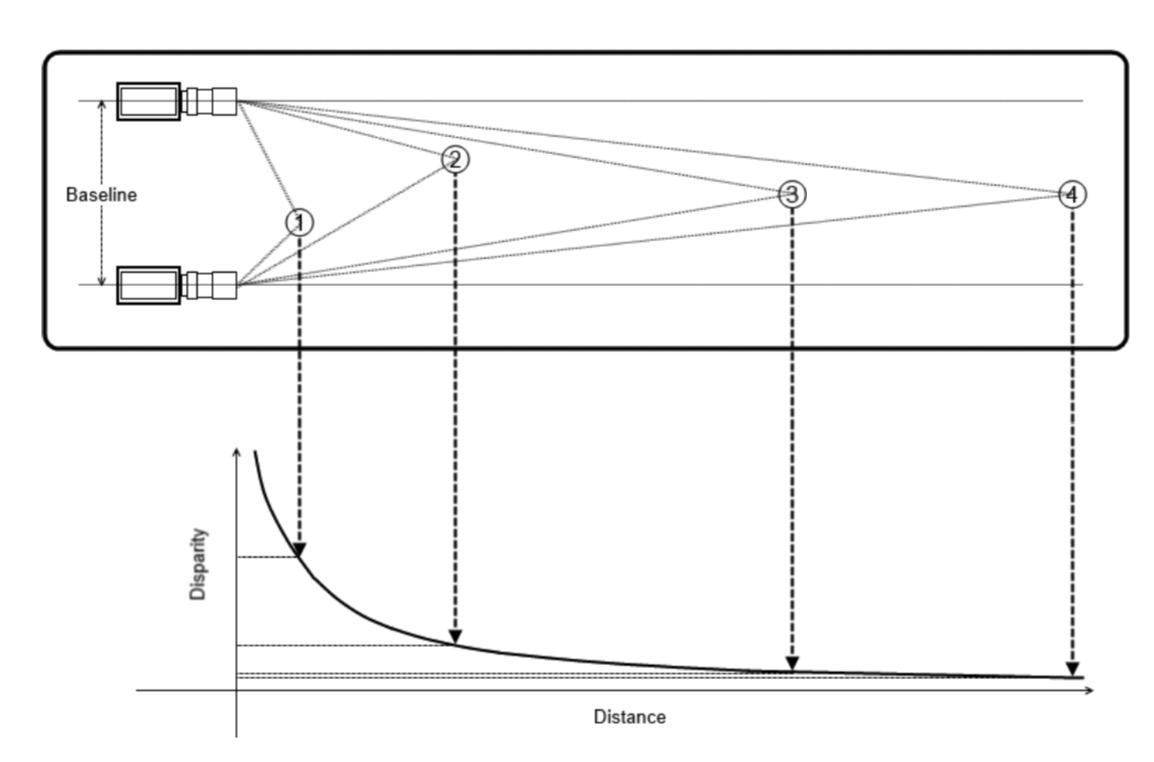
- 这个关系虽然是正比但是不是线性的
- 当disparity接近0的时候,小的disparity的差异会引发非常大的depth的差异
- 当disparity非常大的时候,disparity的改变不会对depth引起太多的影响
- 最终,stereo的系统只在比较接近相机的部分有比较高的depth resolution(如下图所示)
- 上面的例子是二维转一维的,实际在OpenCV的系统里面是三维转二维的
- 在实际的应用里面相机不是那么理想的共线的,要尽量确保共线,才不会引起太多的distortion。最终的目的是通过math的计算让他共线,而不是在物理上共线
- 除此之外,还需要保证相机的拍摄是同步的,避免在拍摄的时候会有东西移动
Epipolar Geometry(简化双目模型)
stereo image system的模型:
- 组合了两个pinhole model
- 加入了新的points epipoles

主要点:
- 对于每个相机都会有一个投影的中心O,并且有两个和这个相关的投影平面
- 在现实中的物体P会在两个投影平面上分别有投影pl和pr
- el或者er,定义是另一个相机的中心在这个投影平面上的投影,el和pl可以形成一条epipolar line
得到要义
- 每个三维的点,都会在每个相机上面得到一个epipolar的,这个点和pr/pl的交点就是epipolar line
- 一个图片里面的feature,在另一个图片里面必须在相对应的epipolar line上面(epipolar constraint)
- 上面那个定义意味着:可以把在图片上寻找特征从二维(图片)降低到一维(线)
- 并且图片的order会保存,比如一条线在两张图里面都是水平的
The Essential and Fundamental Matrices
- E Mat:包括了两个相机的translation和rotation
- F Mat:包括了E的信息,以及相机的intrinsic(在pixel的层面上关联两个相机)
- 二者的区别
- E只知道两个相机的关系,不知道任何关于图片的信息,只在物体的层面上关联了两个相机
- F关联了两个照片在各自图片坐标系里面的关系
E math + F mat(p713,还没有怎么看)
- 在左边的相机里,观察到的点是pl,在右边的相机观察到的点是pr
- pr = R(pl - T)
cv::findFundamentalMat
Computing Epipolar Lines(计算上面模型里面的那条线)
- 有了F Mat之后希望可以计算上面的epipolar line。每一个图片里面的line都会在另一张图片里有一个对应的line
- line用一个三个点的vector来表示
cv::computeCorrespondEpilines
Stereo Calibration
上面已经说了很多的理论知识了所以我们现在就开始calibration吧!
- Stereo calibration是在空间上面计算两个相机的位置。相反,后面要说的rectification才是来保证两张图片行是共线的
- Stereo calibration主要依靠的是找两个相机之间的T和R矩阵,这两个都可以用
cv::stereoCalibrate()来计算- 和单目相机的calibration有些相似,但是单目的相机要寻找一系列相机和chessboard之间的R和T
- 双目的calibration在寻找唯一一个能让左右相机匹配上的R和T
- 可以得到三个等式求解
- 因为图片的noise或者rounding error,每组得到的结果可能会有轻微的不同,最后会取中位数
- calibration会把右边的相机放在和左边的相机相同的plane上面,这样这两个相机得到的图片就是parallel的,但是这时候还不是row-aligned的!!!
- 可以直接通过用这一个函数计算相机的intrinsic,extrinsic和Stereo的参数,不用先进行calibration
Stereo Rectification
- 如果两个图片aligned了,那么根据上面计算出来的disparity就可以很轻易的得到depth map了。但是在实际中只有相机没有这么容易做到
- 目标:我们需要reproject两个image plane,让他们在完全相同的plane里面,可以得到完美的aligned
- 我们希望在rectification之后图片的row aliged,这样stereo correspondence(在两个图片里找相同的点)就会变得更可信而且容易计算
- 在另一张照片里只找match一个点的row
- 这样的结果会有无限个待选
- 我们再人为的加上限制
- 结果会有八个term,四个给左边的相机,四个给右边的相机(两种计算这些参数的算法)
- 每个相机都会有distCoffs和旋转矩阵R,修正和未修正的相机矩阵(4个)
- 用上面这些东西,得到map来确定原图要怎么修改
cv::initUndistortRectifyMap()
Hartley’s algorithm + Bouguet’s algorithm(p730)
Rectification map
Stereo Correspondence
- 在两个图片里面match三维的点,只能在两张图片交叠的地方找到
- 两种不同的算法
- block matching:快,效率高,基于“sum of absolute difference” (SAD)
- 只会找到高度符合的点(highly textured)-> 户外
- semi-global block matching (SGBM) :精确度更高
- matching is done at subpixel level using the Birchfield-Tomasi metric
- enforce a global smoothness constraint on the computed depth information that it approximates by considering many one-dimensional smoothness constraints through the region of interest
- block matching:快,效率高,基于“sum of absolute difference” (SAD)
Block matching
三个步骤
- prefiltering,normal图片的亮度,增强纹理
- 用SAD的窗口,搜索水平的epipolar line
- 在rectificatin之后,每行都是一个epipolar line,所以左边的图片肯定在右边的同一行里面有一个对应的部分
- disparity会在一定的pixel范围里进行搜索,不同范围里的disparity代表的是不同的depth。但是超过了最大值的话就找不到depth了 -> Each disparity limit defines a plane at a fixed depth from the cameras
- Postfiltering,减少比较差的结果
Semi-global block matching
code example (p752)
Structure from Motion
- 从移动中得到构造信息。但是在静止的情况下,一个相机移动得到的信息和两个相机得到的信息没有本质的区别
- 但是如果特别大的时候,就需要通过计算frame之间的关系得到最后的结果(SLAM?)
- 在附录
FitLine(直线拟合)
- 在三维的分析之中比较常用,所以在这里介绍